產品分類
產品分類
機器視覺如何推動自動化
 100
100
 拍明芯城
拍明芯城
作者:喬迪·穆拉納
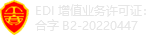
機器視覺是一系列技術,這些技術使自動化設備(工業或其他)從圖像中對直接環境有高度的了解。如果沒有機器視覺軟件,數字圖像將只不過是簡單的未連接的像素集合,具有各種顏色值和色調強度。機器視覺允許計算機(通常連接到機器控制)檢測此類圖像中的邊緣和形狀,從而讓更高級別的處理例程識別預定義的感興趣對象。從這個意義上說,圖像不一定僅限于可見光譜中的攝影圖像;它們還可以包括使用紅外、激光、X 射線和超聲波信號獲得的圖像。
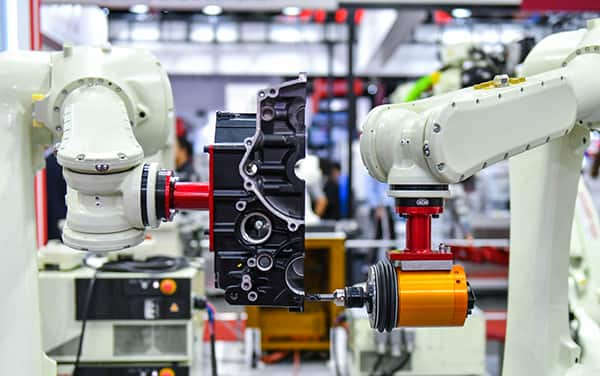
圖 1:機器視覺在更復雜的機器人應用中的使用正在增加。(圖片來源: 約翰6863373 |Dreamstime.com)
工業環境中一個相當常見的機器視覺應用是識別箱中的特定零件,其中包含隨機排列(混亂)的零件混合物。在這里,機器視覺可以幫助拾取和放置機器人自動拾取正確的零件。當然,如果這些部件在托盤上以相同的方式整齊排列和定向,那么通過成像反饋識別這些部件將相對簡單。然而,強大的機器視覺算法可以識別距離相機不同距離的物體(因此在成像傳感器上顯示為不同的尺寸)以及不同方向的物體。
最先進的機器視覺系統使新興設計變得比垃圾箱揀選復雜得多——例如,也許不會比自動駕駛汽車更容易識別。
圖 2:機器視覺使系統(工業或其他)能夠從圖像中對環境設置進行高級理解。(圖片來源: 維基媒體)
機器視覺相關技術
術語 機器視覺 有時保留用于參考從圖像中提取信息的更成熟和有效的數學方法。相比之下,術語 計算機視覺 通常描述更現代和計算要求更高的系統,包括使用機器學習或人工智能 (AI) 的黑盒方法。然而,機器視覺也可以作為一個包羅萬象的術語,涵蓋從圖像中提取高級信息的所有方法;在這種情況下,計算機視覺描述了其基本的操作理論。
從圖像中提取高級意義的技術比比皆是。在研究界,這些技術通常被認為與機器視覺不同。然而,在實際意義上,所有這些都是實現機器視覺的不同方式......在許多情況下,它們重疊。
數字圖像處理 是一種涉及圖像增強、恢復、編碼和壓縮的數字信號處理形式。與模擬圖像處理相比,其優勢包括噪聲和失真最小化,以及更多算法的可用性。早期的圖像增強用途之一是對第一個近距離的校正 月球表面的圖像.這使用了攝影測量映射以及噪聲濾波器和校正,以校正成像相機與月球表面對齊引起的幾何失真。

圖 3:該 DLPC350 集成電路 (IC) 控制器提供輸入和輸出觸發信號,用于將顯示的圖案與相機同步。它與數字微鏡設備(DMD)配合使用,旨在將3D機器視覺傳授給工業,醫療和安全設備。事實上,應用包括3D掃描以及計量系統。(圖片來源: 德州儀器)
數字圖像增強通常涉及增加對比度,并且還可能對視角和鏡頭失真進行幾何校正。壓縮通常是通過將復數信號近似為余弦函數的組合來實現的——余弦函數是一種稱為離散余弦變換或DCT的傅里葉變換。JPEG文件格式是DCT最流行的應用程序。圖像恢復也可以使用傅里葉變換來消除噪點和模糊。
攝影 測量 使用某種特征識別從圖像中提取測量值。當從不同位置獲得同一場景的多個圖像時,這些測量可以包括 3D 信息。最簡單的攝影測量系統使用比例尺測量圖像中兩點之間的距離。為此,通常需要在圖像中包含已知的比例參考。
特征檢測 允許計算機識別圖像中的邊角或點。這是攝影測量以及識別物體和運動的必要第一步。斑點檢測可以識別邊緣過于平滑的區域,無法進行邊緣或角落檢測。
模式識別 用于標識特定對象。簡單來說,這可能意味著在輸送機上尋找特定的明確定義的機械部件。
3D 重建 從 2D 圖像確定對象的 3D 形式。它可以通過攝影測量方法實現,其中通過三角測量確定共同特征的高度(在不同觀察點的圖像中識別)。使用單個2D圖像也可以進行3D重建;在這里,軟件解釋(除其他外)陰影邊緣或區域之間的幾何關系。

圖4: 3D掃描儀 捕獲對象的 2D 圖像以創建其 3D 模型。在某些情況下,數字模型隨后用于3D打印副本。(圖片來源: 深圳市科實3D科技有限公司)
人類可以輕松地從簡單的線條藝術表示中在精神上重建立方體,并從陰影圓圈中重建球體。陰影指示表面的坡度。然而,這種推導的過程比看起來要復雜得多,因為陰影是一維參數,而斜率發生在二維。這可能會導致歧義——這一事實通過描繪物理上不可能的物體的藝術來證明。
圖 5:從 2D 圖像計算機化確定工件的 3D 形狀充滿了挑戰。
機器視覺任務的排序方式
許多機器視覺系統通過從低級操作開始,然后逐個推進到更高級別的操作來逐步結合上述技術。在最低級別,圖像的所有像素都保存為高帶寬數據。然后,序列中的每個操作識別圖像特征,并用相對較少的數據量表示感興趣的信息。
首先是圖像增強和恢復的低級操作,其次是特征檢測。因此,在使用多個傳感器的情況下,低級操作可以通過專用于單個傳感器的分布式進程執行。一旦檢測到單個圖像中的特征,就可以進行更高級別的攝影測量 - 任何物體識別或其他依賴于來自多個圖像和傳感器的組合數據的任務也是如此。
直接計算和學習算法
一個 直接計算 在機器視覺的上下文中,是一組由人類程序員手動定義的數學函數。它們接受圖像像素值等輸入,以生成對象邊緣坐標等輸出。相比之下,學習算法不是由人類直接編寫的,而是通過示例數據集進行訓練,將輸入與所需的輸出相關聯。因此,它們充當黑匣子。現在,大多數此類機器學習都采用基于人工神經網絡的深度學習來進行計算。

圖 6:來自 iVu 系列 可以按類型、尺寸、位置、方向和顏色識別工件。機器視覺組件可以接受集成屏幕、遠程HMI或PC的配置和監控。相機、控制器、鏡頭和燈光都是預先集成的。(圖片來源: 邦納工程公司)
如果基于直接計算,用于工業應用的簡單機器學習通常更可靠,計算要求更低。當然,直接計算可以實現的目標有限。例如,它永遠不可能希望執行通過面部識別個人所需的高級模式識別,尤其是不能從擁擠的公共空間的視頻源中識別個人。相比之下,機器學習可以巧妙地處理此類應用程序。難怪機器學習越來越多地被部署在較低級別的機器視覺操作中,包括圖像增強、恢復和特征檢測。
改進教學方法(不是算法)
深度學習技術的成熟已經表明,需要改進的不是學習算法本身,而是它們的訓練方式。一種這樣改進的訓練程序稱為 以數據為中心的計算機視覺.在這里,深度學習系統接受由數千、數百萬甚至數十億張圖像組成的非常大的訓練集,然后存儲其算法從每張圖像中提取的結果信息。這些算法通過練習工作示例來有效地學習,然后參考“答案書”來驗證它們是否達到了正確的值。
一個關于數字模式識別早期的古老故事是一個警示故事。美國軍方打算使用機器視覺進行目標識別,國防承包商演示可靠地識別了美國制造和俄羅斯制造的坦克。各種坦克都與供應商的航拍照片一個接一個地正確區分。但是,當用五角大樓自己的圖片庫再次測試時,系統不斷給出錯誤的答案。問題在于,國防承包商的圖像都描繪了沙漠中的美國坦克和綠色田野中的俄羅斯坦克。該系統遠非識別不同的坦克,而是識別不同顏色的背景。道德?學習算法需要與精心策劃的訓練數據一起呈現才能有用。
結論:機器人工作單元安全愿景
機器視覺不再是一種利基技術。它在工業應用中的部署增長最快。在這里,最引人注目的發展是機器視覺現在如何補充工業工廠安全系統,當工廠人員在沒有安全帽、口罩或其他正確防護設備的情況下進入工作區時,它會發出警報或發出音頻通知。機器視覺還可以完成系統,當叉車等移動機械離人太近時發出通知。
這些和類似的機器視覺系統有時可以取代工業機器人周圍的硬防護,以實現更高效的操作。它們還可以替換或增強基于輕型防護裝置的安全系統,如果工廠工人進入工作單元,該系統只需停止機器。當機器視覺監控工作單元周圍的工廠車間時,這些單元中的機器人可能會隨著人們的接近而逐漸減速。
隨著工業環境設計的發展,以適應協作機器人和其他工作單元設備,這些設備對工廠人員可以安全移動(即使在設備運行時),這些和其他基于機器視覺的系統將成為工廠流程中更常見的部分。
責任編輯:David
【免責聲明】
1、本文內容、數據、圖表等來源于網絡引用或其他公開資料,版權歸屬原作者、原發表出處。若版權所有方對本文的引用持有異議,請聯系拍明芯城(marketing@iczoom.com),本方將及時處理。
2、本文的引用僅供讀者交流學習使用,不涉及商業目的。
3、本文內容僅代表作者觀點,拍明芯城不對內容的準確性、可靠性或完整性提供明示或暗示的保證。讀者閱讀本文后做出的決定或行為,是基于自主意愿和獨立判斷做出的,請讀者明確相關結果。
4、如需轉載本方擁有版權的文章,請聯系拍明芯城(marketing@iczoom.com)注明“轉載原因”。未經允許私自轉載拍明芯城將保留追究其法律責任的權利。
拍明芯城擁有對此聲明的最終解釋權。
相關資訊
:
基于Xilinx XCKU115的半高PCIe x8 硬件加速卡設計方案

圖像傳感器在汽車、工業和邊緣AI的應用動向

基于RFID技術的智能檔案管理系統設計方案

如何確保工業物聯網設計符合ISA/IEC安全標準

基于LPC55S69+i.MX 8M的快速靈活EV充電系統解決方案

如何利用物質連接智能家居自動化的孤島













 2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)